Humanoid robots walk naturally
By
Kimberly Patch,
Technology Research NewsThere's a reason most movie robots have wheels in place of legs or are powered by an embedded human. Making machines walk on two legs is exceedingly difficult.
There are at least four major challenges -- working out the movements that make up a practical bipedal step, finding ways to handle uneven terrain and unexpected jostling, making the system energy-efficient, and giving the system the ability to move away when pushed, which is important for safety, especially in robots designed for use around people.
In short, when it comes to robots, walking down the street is not like rolling off a log.
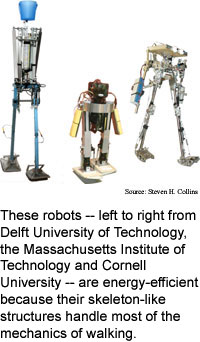
Researchers from Delft University in the Netherlands, Cornell University, and the Massachusetts Institute of Technology have moved robot bipedal motion a large step forward with three similar robots that walk like humans.
The three robots tap passive-dynamic walker technology, a field begun with the 1988 discovery by Tad McGeer that a skeleton can very nearly walk on its own. Passive-dynamic walkers are simple mechanical devices made from rigid parts connected by joints, and the skeleton-like structures can walk by themselves down a slope. Gravity provides all the power they need, and their movements look much like human walking motions. The three new robots walk on level ground with small active power sources substituting for gravity.
The concept is analogous to the Wright brother's approach of perfecting glider flight and then attaching an engine to the airplane, according to the researchers.
The passive-dynamic walker robots use less energy to move and their walking motions look more human than existing bipedal robots, said Andy Ruina, a professor of theoretical and applied mechanics and mechanical and aerospace engineering at Cornell. The big difference in the passive-dynamic design is instead of controlling all joint movements all the time, most of the joints are left to swing freely, he said.
This line of research promises to improve our understanding of how people walk, said Ruina. "This general understanding should assist in the development of analysis and correction of various human disabilities," he said.
Better understanding, in turn, also promises to improve robot technology, especially along the lines of efficiency and safety. Passive-dynamic walker robots could eventually be used to assist humans in many contexts, including search and rescue efforts, hazardous environments, schools, hospitals, and homes.
The potential uses include prosthetics and rehabilitation robots, said Stephen Collins, one of the Cornell researchers who is now at the University of Michigan. Collins is currently working on a foot prosthesis prototype that stems from the robotics work.
The Cornell robot stands about as tall as a small adult and weighs 13 kilograms, or a little less than 29 pounds, and is the most energy-efficient of the robots. The child-size Delft robot weighs 8 kilograms, or a little less than 18 pounds, and uses pneumatics. The MIT robot stands 17 inches tall, weighs 2.75 kilograms, or about six pounds, and uses a learning algorithm to constantly adapt to changing terrain. The Cornell and Delft robots use a single pivoting joint for hips. The MIT robot does not have knees.
The Cornell robot was designed to be as energy-efficient as possible, and is nearly as efficient as a human. It requires three watts of energy to walk; including electronics, it consumes 11 watts.
The most significant technical challenge in building the Cornell robot was providing power in a way that did not interfere with the natural dynamics of the machine, said Collins. "We took special care to make sure the actuators never got in the way by doing negative work," he said. "The motor is on a one-way clutch that ensures that it can only add energy and never absorb it."
It was also challenging to find a foot shape that kept the robot balanced, said Ruina.
The robot walks by moving forward on one leg while the second leg swings forward passively with the knee joint unlocked; the knee joint is locked by a small sprung latch when it reaches full extension. This is also a passive, or non-powered movement. When this leg hits the ground, it triggers the first leg to push off.
During the push off a spring causes the first leg to extend and push the machine forward. When the ankle has fully extended, a motor pulls the foot up, restoring the energy in the ankle spring. "These springs sort of look like calf muscles, and sort of act like the human Achilles tendon does in human walking," said Collins.
In contrast, most robots directly drive joints with large motors that use gears to control the amount of push a joint receives. "This makes it impossible for the joints to swing freely or for the mechanical system to have dynamics of its own," said Collins. Honda's Asimo, for example, seems to keep its center of mass at the same height across each step, and its feet remain flat on the ground, he said.
This means all the positive work done by the motors is balanced by negative work that the motors must absorb, said Collins. "So Asimo, representative of position-controlled robots, dissipates as much mechanical power as it produces -- which is the neighborhood of 390 Watts... to walk," he said.
In mimicking human design the robots are revealing some of the secrets of human walking efficiency.
The Delft robot walks in a way similar to the Cornell robot, but is powered by a pneumatic system that drives its hip joint. It has particularly good balance due to ankles that kinematically couple leaning and steering. This suggests that humans probably link the placement of the leaning foot and stepping foot to aid balance, and hints at better ways to design foot prostheses.
The MIT robot's learning algorithms are also biologically plausible; they mimic the way biological motor learning probably occurs, according to the researchers.
The robot makes small, random changes to the way it takes a step and measures the effect of the change. It combines measurements from previous steps with measurements of the current step to improve its stability.
The combination of the passive walker technology and biologically plausible learning algorithms resulted in a robot that learned much more quickly than previous attempts at producing bipedal robots that teach themselves to walk. The MIT robot learns to walk by rocking back and forth for about 10 minutes, and can start, stop, steer, walk forward, and walk backward.
The combination also showed that very small changes to the control parameters were useful in learning. This allowed the robot to continue to learn and adjust as it walked. The learning system works quickly enough for the robot to adapt to different terrain -- like bricks, wooden tiles and carpet -- as it walks, according to the researchers' tests.
The passive-dynamic walking robots research is very important, said Stefan Schaal, an associate professor of computer science and neuroscience at the University of Southern California. "It has great potential to accomplish machines that, in the end, will have... high energy efficiency," he said. "If we wish to have autonomous robots to help in our society at some point, it would be [impractical] if the robot needs to recharge every 30 minutes, like is typically the case with the Honda robot." High energy consumption also requires heavy energy supplies, making a robot heavier and thus potentially more dangerous.
The research fits into the bigger picture of human-centered robotics, a well-funded area aimed at producing robots that will be able to assist broad populations, said Schaal. Such models require multi-modal sensing, high levels of dexterity and mobility, safe operation, and energy efficiency, he said.
"Target applications include assistance for the growing elderly population and for people with physical and cognitive disabilities, guidance of children and other at-risk populations on their commute, crowd and emergency response in densely populated areas, robotics rehabilitation and prosthetics, movement instructions for training, exercise and entertainment activities, science education [and] search and rescue efforts in hazardous environments," said Schaal.
Many researchers believe that human-like robots will be the most suitable for these purposes, Schaal added.
The Cornell researchers are working on making a robot that can walk a mile or more, and giving the robot the ability to steer, balance, start and stop. "The MIT 'learning' robot already does this," said Ruina. "But we want to do it while maintaining the efficiency of the Cornell robot."
Foot prostheses inspired by the robots could be ready for practical use in five years, said Collins. Practical bipedal robots are at least 20 years away, he said.
Collins and Ruina's research colleagues were Russ Tedrake of MIT and Martijn Wisse of Delta University. The work appeared in the February 18, 2005 issue of Science. The research was funded by the National Science Foundation (NSF) and the Packard Foundation.
Timeline: 5 years; 20 years
Funding: Government, Private
TRN Categories: Robotics
Story Type: News
Related Elements: Technical paper, "Efficient Bipedal Robots Based on Passive-Dynamic Walkers," Science, February 18, 2005; movie of Cornell robot 2005/TRN_Humanoid_robots_walk_naturally.xml; movie of Delft robot 2005/TRN_Humanoid_robots_walk_naturally.xml; movie of MIT robot 2005/TRN_Humanoid_robots_walk_naturally.xml
Advertisements:
February 23/March 2, 2005
Page One
Humanoid robots walk naturally
Software gives descriptive directions
Springs simplify micromirror arrays
Impact Assessment:
Roadside Eye Catchers
Briefs:
Process yields semiconductor foam
Rod arrays focus sound
Metal atoms make silicon magnetic
Speech software makes concept maps
Tiny transistors sniff chemicals
Plastic changes color in heat
Light writes data in electrons
News:
Research News Roundup
Research Watch blog
Features:
View from the High Ground Q&A
How It Works
RSS Feeds:
News
Ad links:
Buy an ad link
| Advertisements:
|
 |
Ad links: Clear History
Buy an ad link
|
TRN
Newswire and Headline Feeds for Web sites
|
© Copyright Technology Research News, LLC 2000-2006. All rights reserved.